Pozrite si
Popri GPS dnes máme k dispozícii aj ďalšie siete satelitnej navigácie s globálnym pokrytím (ruský GLONASS, európsky Galileo, čínsky Beidou) a niekoľko regionálnych. Všetky fungujú na podobných technológiách triangulácie signálu prostredníctvom viacerých satelitov súčasne.
Čím viac satelitov komunikuje s prijímačom GPS (alebo iným) súčasne, tým väčšia je presnosť určenia polohy. Skutočnosť, že systém GPS bol pôvodne určený na vojenské účely – pri takých aplikáciách dosahuje maximálnu presnosť – nechajme bokom.
Pre určenie zemepisnej šírky a dĺžky sú potrebné minimálne tri satelity a pre zistenie polohy s nadmorskou výškou štyri. Určenie polohy však ovplyvňuje celý rad faktorov, ktoré sa v čase a priestore menia. Satelity sú v pohybe, preto prijímač v každom okamihu môže zachyť odlišnú konfiguráciu družíc. Silu a kvalitu signálu ovplyvňuje aj oblačnosť, poveternostné podmienky, stromy, vysoké budovy, odrazy a podobne.
K vyjadreniu presnosti GPS slúži hodnota CEP (Circular Error Probable), čo v preklade znamená „pravdepodobná kruhová chyba“, alebo odchýlka.
CEP vychádza z teórie pravdepodobnosti a pôvodne bola určená na posudzovanie presnosti zbraňových systémov. V balistike je CEP definovaná ako polomer kruhu, od hranice ktorého sa očakáva, že bude zahŕňať 50% zásahov. Inak povedané, je to stredný polomer chyby.
Napríklad, ak má daná séria výstrelov (alebo určovaní polohy) CEP 100 m, pri stovke výstrelov (alebo meraní) zameraných na rovnaký bod, bude 50 spadať do kruhu s polomerom 100 m okolo ich priemerného bodu dopadu.
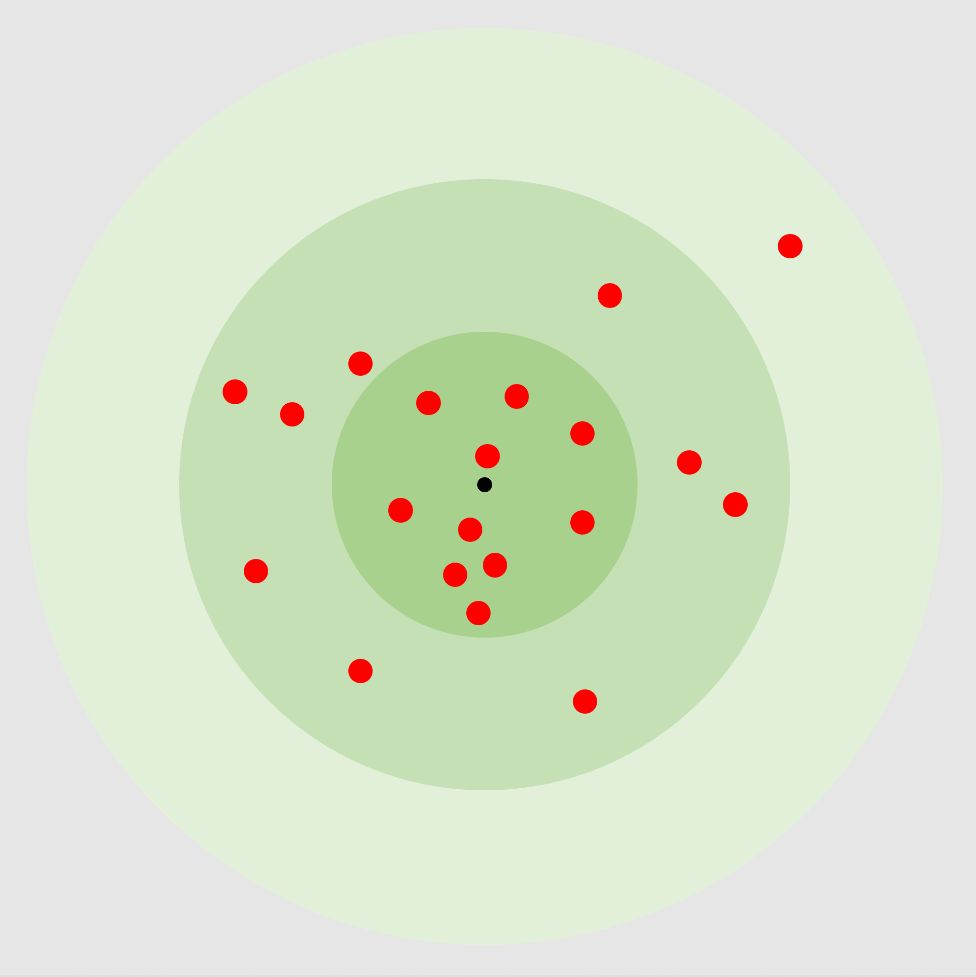
Pri satelitnej navigácii sú namerané polohy rozptýlené okolo skutočnej pozície s náhodnými odchýlkami podobne, ako zásahy pri streľbe vzduchovkou okolo stredu terča. Jedno meranie preto nepovie o presnosti GPS prijímača prakticky nič.
Pre získanie relevantných údajov o presnosti GPS prijímača je preto potrebné urobiť minimálne 10 meraní na mieste so známymi súradnicami, v rôznych hodinách a dňoch.
Veľkosť chyby totiž závisí aj na polohe satelitov na oblohe, ako sme už spomínali. Pre každé meranie sa určí odchýlku v metroch a z výsledku sa stanoví stredná hodnota CEP tak, aby polovica nameraných odchýlok bola nižšia a druhá polovica vyššia, ako stredná hodnota.
Pravdepodobná kruhová chyba sa udáva v metroch. Môžeme si ju predstaviť ako kruh o polomere CEP, nakreslený okolo zameriavaného bodu polohy. Ak v tomto mieste urobíte viacero meraní, polovica nameraných pozícií bude ležať bližšie k skutočnej pozícií ako je hodnota kruhovej chyby CEP, druhá polovica meraní bude mať odchýlku väčšiu. Tieto pozície budú teda ležať mimo kruh.
Ilustrovať sa to dá na presnosti konkrétneho prijímača GPS. Podľa údajov spoločnosti Vimron pracuje GPS prijímač používaný v ich produktoch s chybou CEP = 2,5 metra.
Z toho vyplýva, že s 50% pravdepodobnosťou je reálna poloha od nameraného bodu v kruhu s polomerom do 2,5 m, so 68% pravdepodobnosťou je táto reálna poloha v kruhu s polomerom do 3,12 m, s pravdepodobnosťou 95% je v kruhu s polomerom do 6,25 m a s pravdepodobnosťou hraničiacou s istotou (99,7%) leží reálna poloha v kruhu s polomerom do 9,37 metrov od nameraného bodu.
Pre raketové vojsko a delostrelectvo by možno takáto presnosť určovania polohy nebola optimálna, ale pri navigácii a v aplikáciách, využívajúcich určovanie polohy je úplne v pohode. Pri niekoľko metrovej odchýlke nehrozí, že nestihnete správne odbočiť v križovatke, alebo netrafíte správny výjazd z kruhového objazdu.